


Udacity 自动驾驶工程师纳米学位 第二学期 无迹卡尔曼(UKF)学习笔记
项目代码GitHub链接
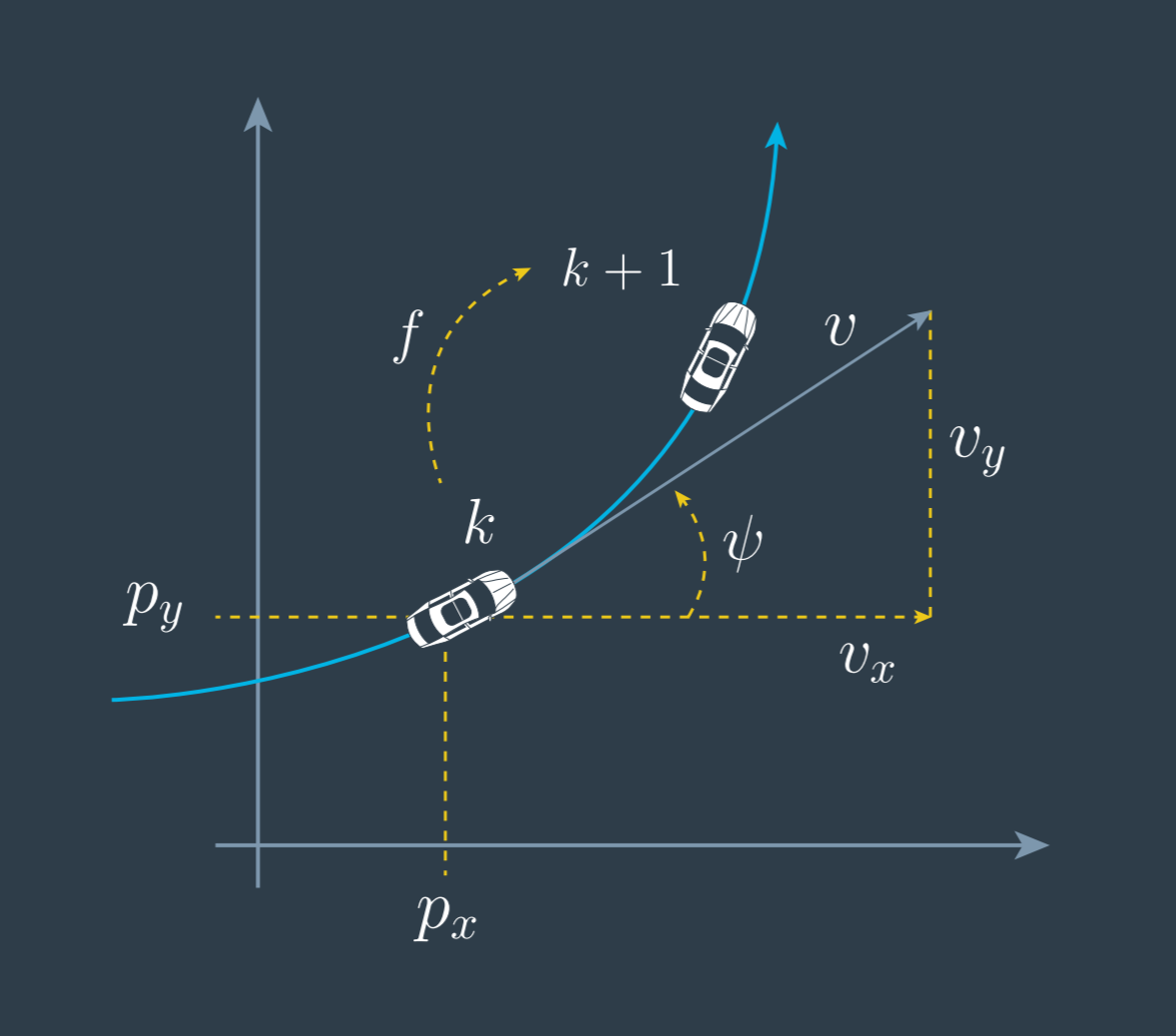
UKF 可采用匀速圆周运动模型,CTRV(Constant Turning Rate and Velocity model)
状态方程或过程模型(Process Model)
状态向量(state vector)选取
$$ x = (p_x, p_y, v, \psi, \dot {\psi}) $$
状态方程或过程模型(process model)如何得到,一个比较通用(general)的方法就是求解状态在两帧之间的变化量(Change Rate of State),其实就是状态量关于时间的微分。
(广义)线性回归是机器学习很基础也是很重要的内容,如何来更好地理解线性回归(linear regression)和逻辑回归(logistic regression)。
hexo 极大地方便了博客的书写,并且能提供多种多样的主题😁。对于hexo常用的几个命令当然要非常熟练。
但是将hexo博客托管在github上后,发现多机同步跟想象中的不一样啊。hexo的deploy并没有在本地初始化git仓库,用的貌似是另外一套机制,而且博客原文并没有传到github上,传上去的是一些编译之后的html等文件,这样对于多机同时管理博客就有点不方便了。看样子有必要在本地重新配置一个git仓库,把必要的一些文件都传上去,这样子在另外一台电脑也可以开心地写博客了。
论文要抓紧做了,加油加油!简单的一个小记录。
paper放在这儿
物体(目标)检测历史发展,分析得十分到位,学习了!
Before Faster RCNN and YOLO
classic cv:HOG(方向梯度直方图)/ LBP(局部二值模式)+ sliding window(滑窗)/selective search(显著特征搜索) + SVM
人工提取特征,一般要求你对机器图像领域有较为深刻的理解,另一个是运行速率慢。
上一期写的简历被吐槽了,只好再寻思着改进一下。还是不愿意用word,那就更近一步,用Tex写吧。之后写论文估计也得用LaTex,先入坑再说吧~
转眼就要毕业,以前用学校模版写的简历现在看着怎觉得不顺眼,想着是不是可以用Markdown重新写一个。但是markdown的默认排版显然不够看的,可以用pandoc润色下,还能导出许多格式。但是自己一步步做挺麻烦的,还是去网上找模版吧,嘿哈~
When you work on a complicated python project, there are many custom packages. In order to manage these packages and avoid shadowing stardand libary, we intend to use absolute import. But there are something you should be careful when you use it.
Welcome to Hexo! This is your very first post. Check documentation for more info. If you get any problems when using Hexo, you can find the answer in troubleshooting or you can ask me on GitHub.
Quick Start
Create a new post
|
|
当前网速较慢或者你使用的浏览器不支持博客特定功能,请尝试刷新或换用Chrome、Firefox等现代浏览器